Preparing Snow Cones Using a Robot Arm
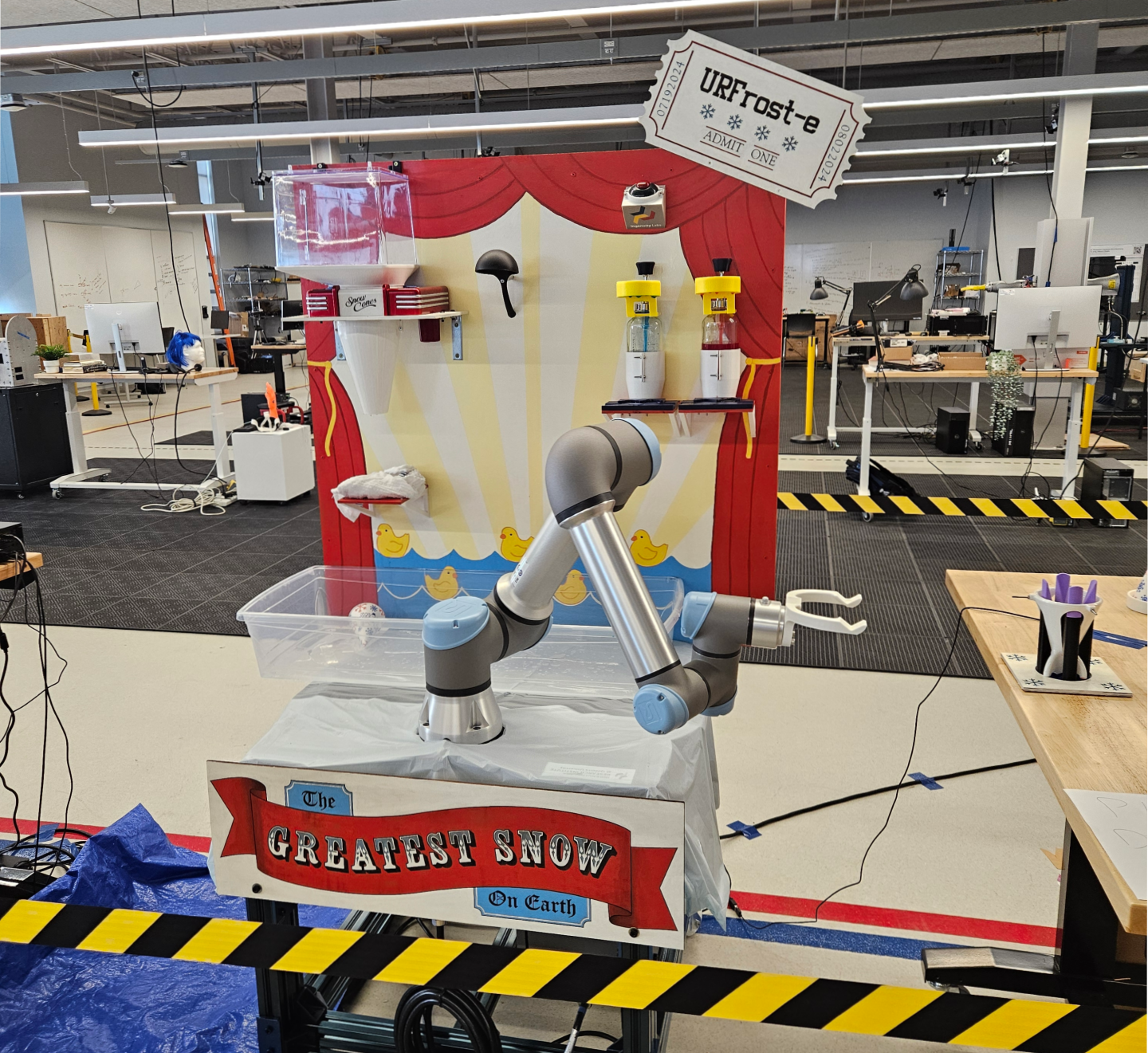
During my time at Ingenuity Labs, I helped create a cell capable of making a snow cone for guests at the RAIS 2024 conference
Using a UR5e 6DOF manipulator, we used open-loop posiition control (i.e moving the manipulator through waypoints) to make snowcones – this includes turning on the ice machine, placing the empty cup under the ice machine, waiting for the cone to be filled, then pumping w/ syrup and presenting to the customer. We made snow cones for about 50 people.
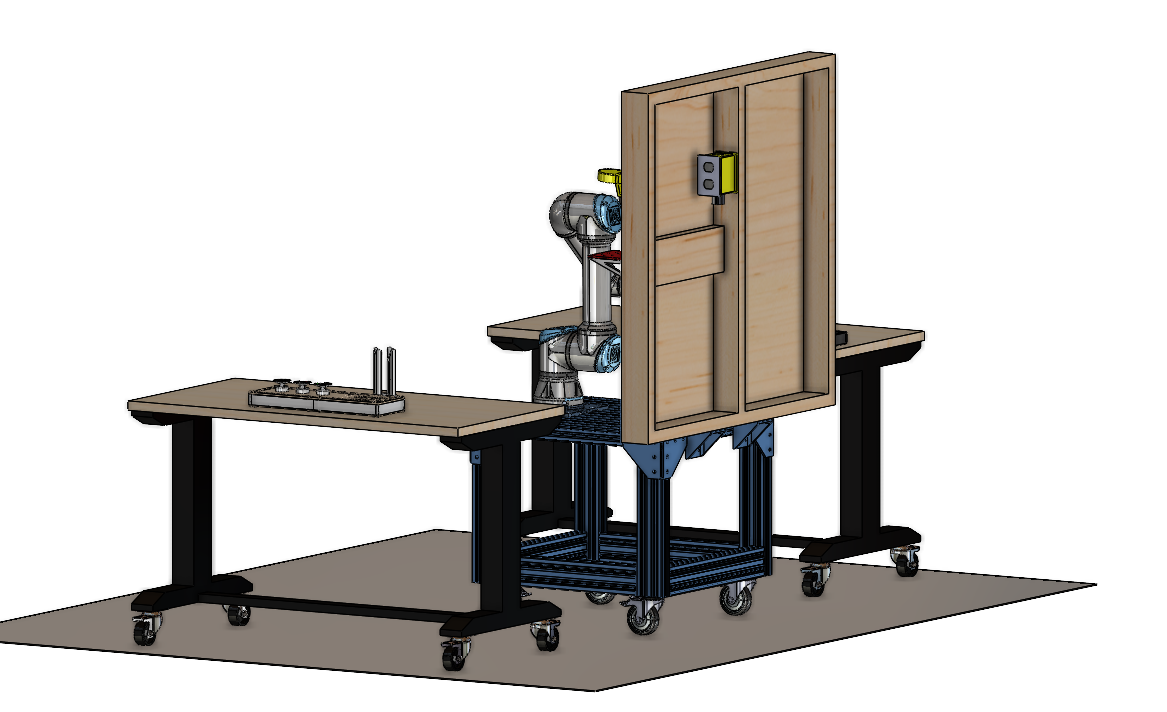
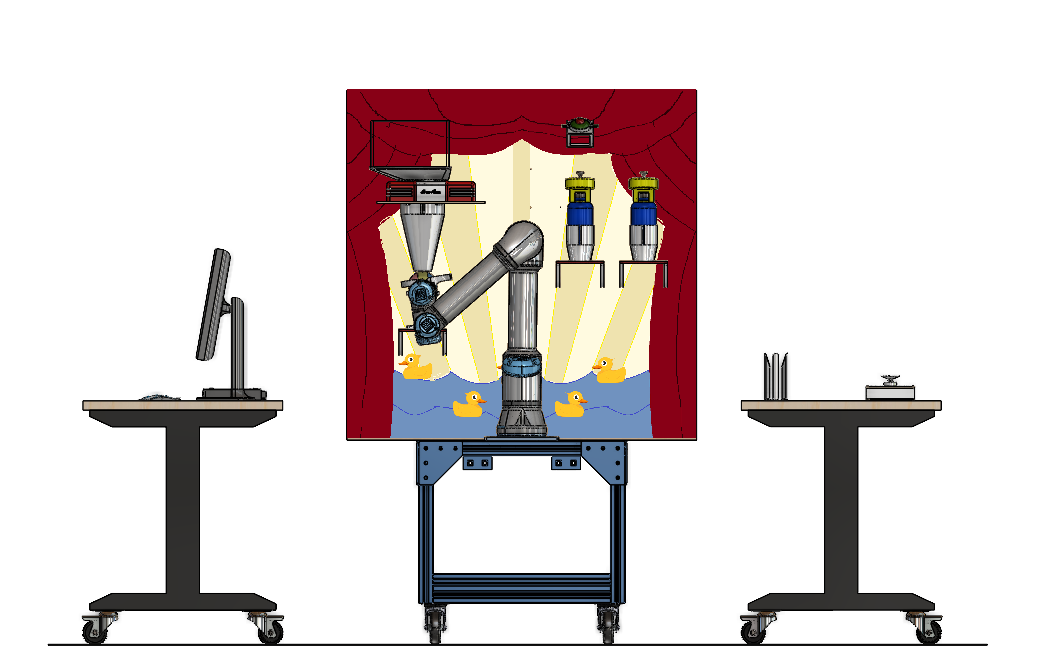
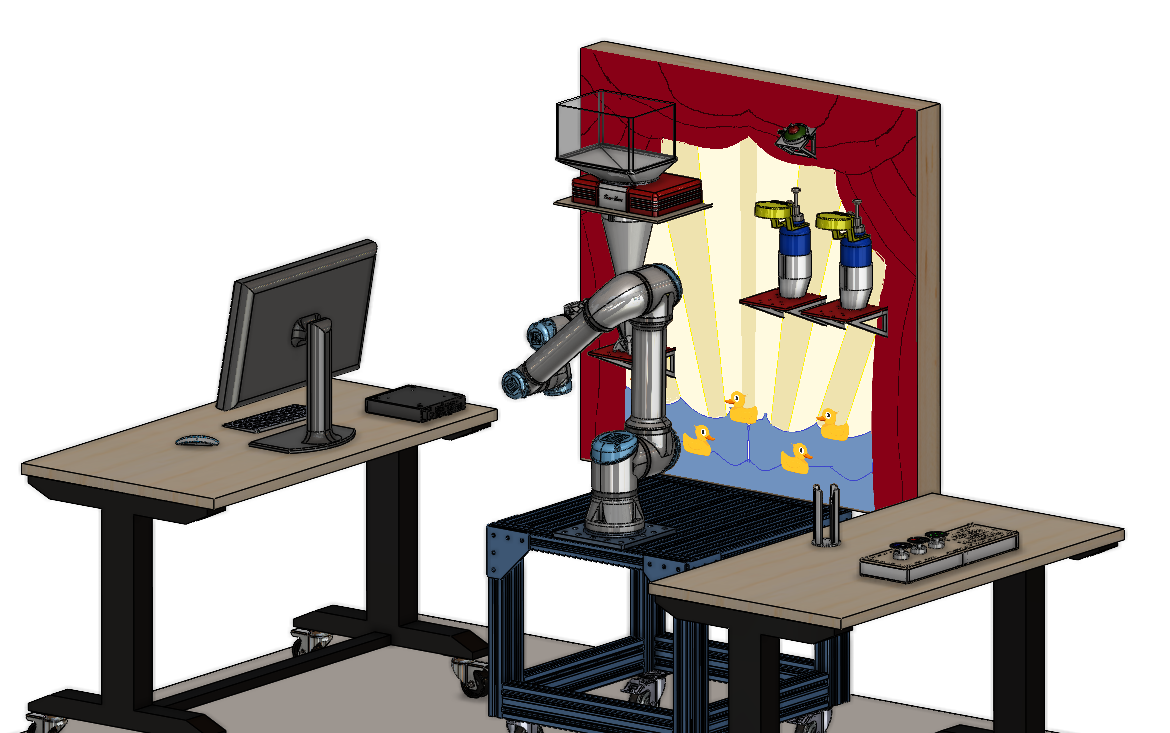
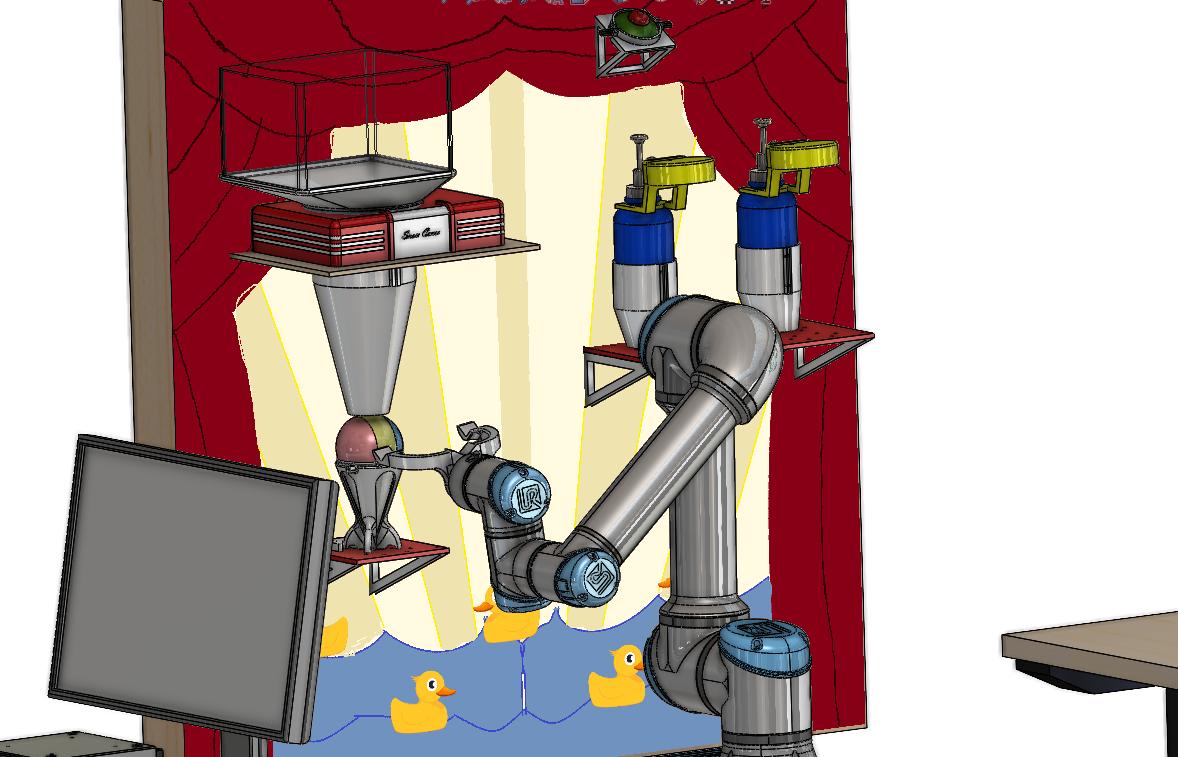
Here are some photos of the cell I cadded in Solidworks for visualization/animation:
 Back side view
Back side view
 Front side view
Front side view
 Isometric View
Isometric View
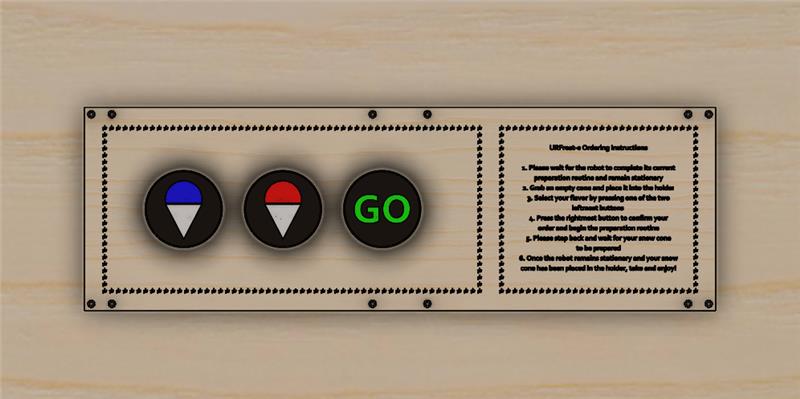
 Here is the ordering unit I made. You can ask for blue snow cones, red snow cones, and press “GO” to begin the cycle. There is a keyboard underneath, so pressing buttons on the interface corresponds to pressing keys on the keyboards. The keys pressed are read in a ROS2 script that are scanning for input. If the correct sequence is pressed (i.e “Red”, then “Go” & the robot isn’t busy preparing a snow cone), then the robot begins making a snow cone.
Here is the ordering unit I made. You can ask for blue snow cones, red snow cones, and press “GO” to begin the cycle. There is a keyboard underneath, so pressing buttons on the interface corresponds to pressing keys on the keyboards. The keys pressed are read in a ROS2 script that are scanning for input. If the correct sequence is pressed (i.e “Red”, then “Go” & the robot isn’t busy preparing a snow cone), then the robot begins making a snow cone.
 PC View
PC View
Related albums
Fail-Proofing Mechanisms for Wheeled Robots
6 photos

Queen's Baja: Making Race Car Parts Strong Using Simulation
16 photos