VEX Robotics Qualification 2025: Striving for Consistency
Striving for consistency with robot mechanical design
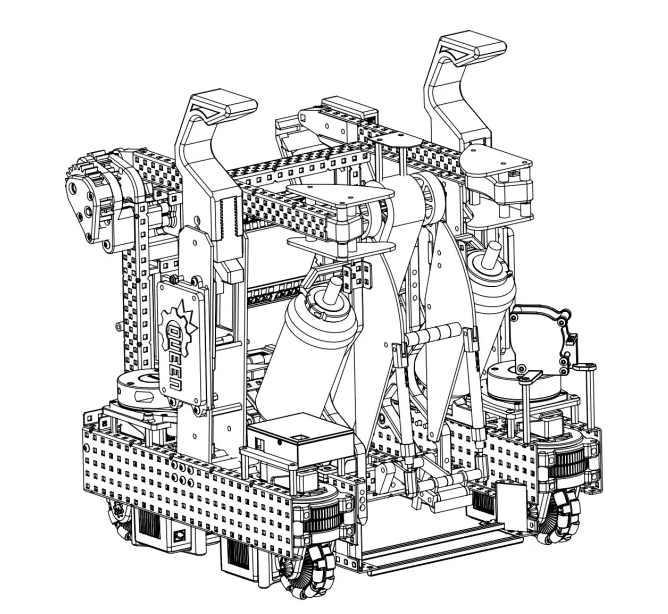
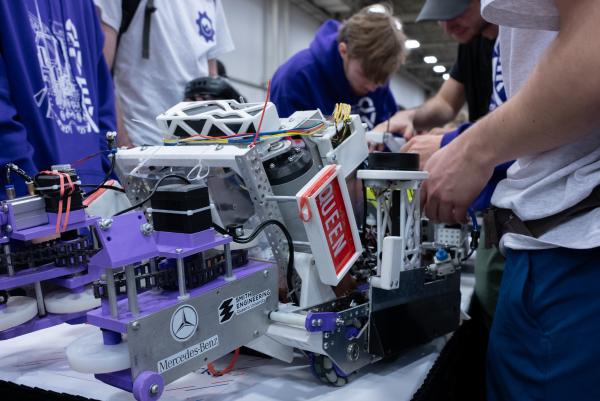
I directed the mechanical design of four robots during the 2024-2025 school year for the Queen’s Vex Robotics Team. Our team builds two robots per semester, and uses them to compete in a 2v2 face-off against other universities around the world. The competition this year was called High Stakes, where the main goal of the game is to score more plastic rings on stakes than your opponent. Our first set of robots this year were really successful, allowing us to achieve a peak global ranking of 3/256 teams, win 8 awards at four tournaments, place top 3 in Canadian national qualifiers, and develop some hard to pull off mechanisms.
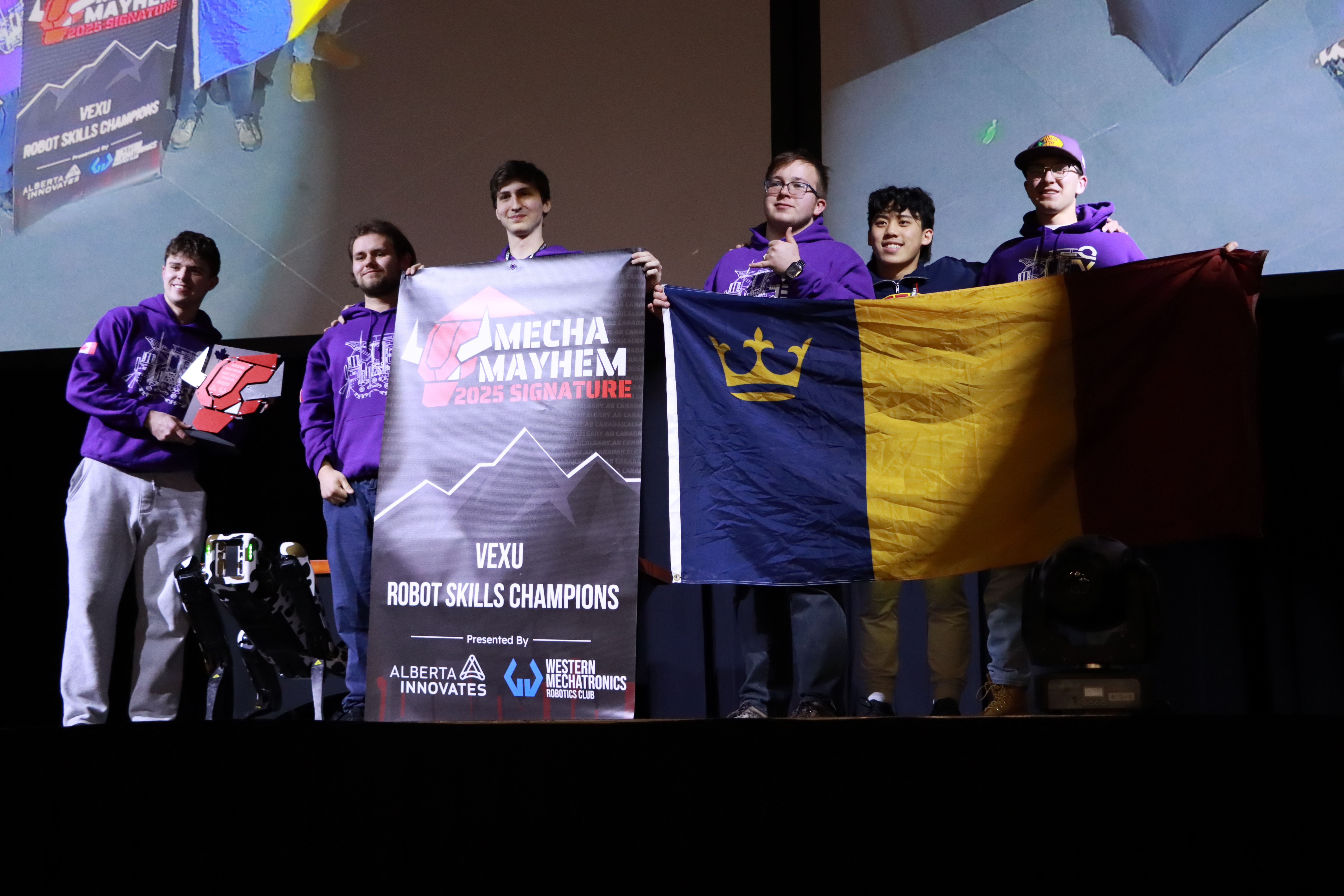
We also successfully achieved the unofficial world record for most points scored in autonomous skills as seen below. This is basically a 2v0 time trial, where your two robots see how many points they can score autonomously in a 1 minute period.
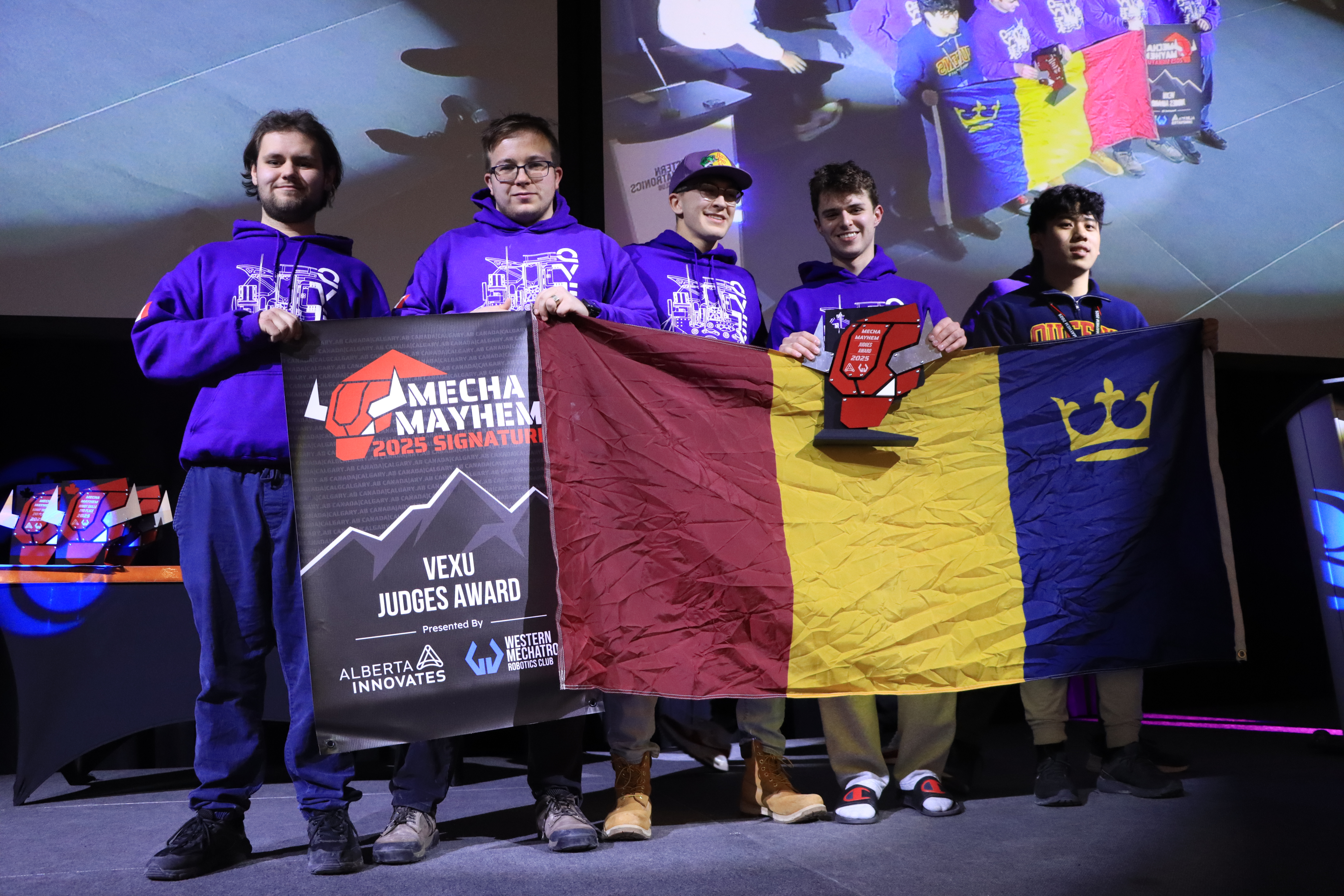
At Canadian nationals (Mecha Mayhem 2025) we beat 9 teams to win Skills Champions, and also were selected as the Judges Award recipients.


Consistency and Iteration
A lot of things make a prototype good. One that I’ve come to realize that is very important is adjustabilitiy in design. The difference between something working well, and not working well, can be mere millimetres. For example, this linear intake system I helped make did a poor job at intaking the rings into the robot until we raised the height of the rolling wheels by 5mm by adding shims on the bottom of the linear rods. This compressed the ring less and allowed it to smoothly ride its way into the conveyor. Mechanical prototyping is a game of tolerances and tuning and leaving room in your design for adding things like shims can come a long way. Identifying variables that may be necessary to tune is also a skill and something that comes with experience.
Awards from RIT, Mecha, Mid-Atlantic and QRC:

Other Takeaways
-
It is generally pretty hard to organize a bunch of people to work on CAD simultaneously. Using volume allocations and making sure people are communicating saves future pain of mechanisms built by two different people not being compatible
-
Its pretty easy to fall too deep into building a mechanism that isn’t needed/can be solved in a simpler way. Identifying when you are in too deep is important because the sooner you realize that the 10-bar-linkage your are trying to design isn’t going to work, the sooner you can start thinking about something simpler that might work.
-
In VEX, fast, simple and light mechanisms are almost always optimal. This one could be debatable depending on context but 99% of the time something that is light and fast and simple is going to allow for more points scored and less failure modes.
In-CAD (we use OnShape)
 Mid-Atlantic Awards
Mid-Atlantic Awards
 RIT Awards
RIT Awards

Wall-stake Testing
This is 1/2 of the work from the year; see my world’s post for more details here.




Related albums

Ingenuity Labs: Characterizing VR Headset Performance with Cobots
6 photos
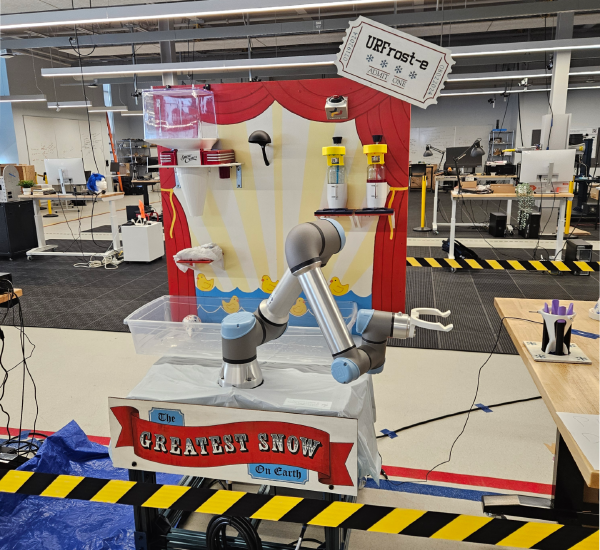
Preparing Snow Cones Using a Robot Arm
6 photos
Fail-Proofing Mechanisms for Wheeled Robots
6 photos