VEX Robotics Worlds 2025: Managing Complexity in Mechanical Design
Building complicated robots fast
This post explains the second half of my year directing the mechanical design of the Queen’s VEX Robotics Team. At QVEX, we compete in the VEX U Robotics Competition, where we travel to different universities around the world to play in a 2v2 robotics game that changes every year. This years game was called High Stakes; the main challenges were to score rings on stakes (each ring is worth points) and climb your robot up a 3ft tall ladder (the higher you go the more points you get). In 8 months we built four robots, won 12 awards at 6 tournaments around North America, developed off-META mechanical systems that have never been pulled off before in VEX’s history and were named the VEX AI Skills World Champions.
What We Built:
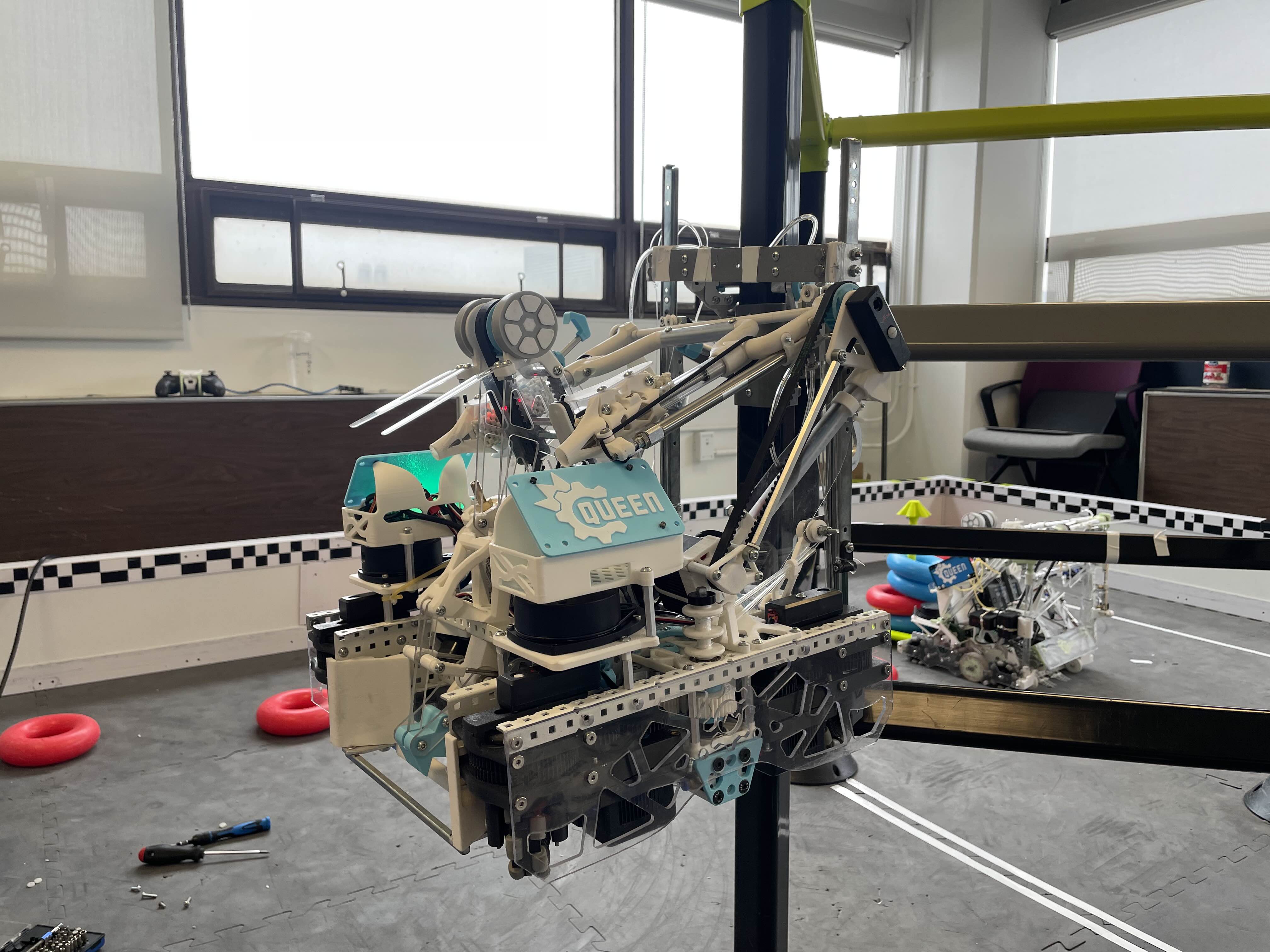
From February to May we built two robots; one is a differential-swerve PTO (power take off) robot that can climb up the center ladder. The other is a conventional tank drive built for speed. The point of these robots is to intake rings off of the ground and score them on stakes. They also operate autonomously in the 30 second autonomous period at the start of the match – we use complex localization algorithms so the robots know where they are on the field. We feature custom PCB design to gather data from our onboard LiDARS, IMUs and cameras to help localize us on the field. This video from Pits N’ Parts explains our robots in detail.
Here is our climbing robot making it all the way up the ladder for the first time. We divert the power from our drivetrain through a PTO that drives a cascading lift that pulls us up and down the ladder. We spent a lot of time working on this system and to see it work for the first time was an amazing feeling.
It is customary to make a reveal video for your robots, so here is ours:
Here is an example match we played at the world championships. We ended up being disqualified from this match for interfering with the other team’s climb but it showcases what our robots can do.
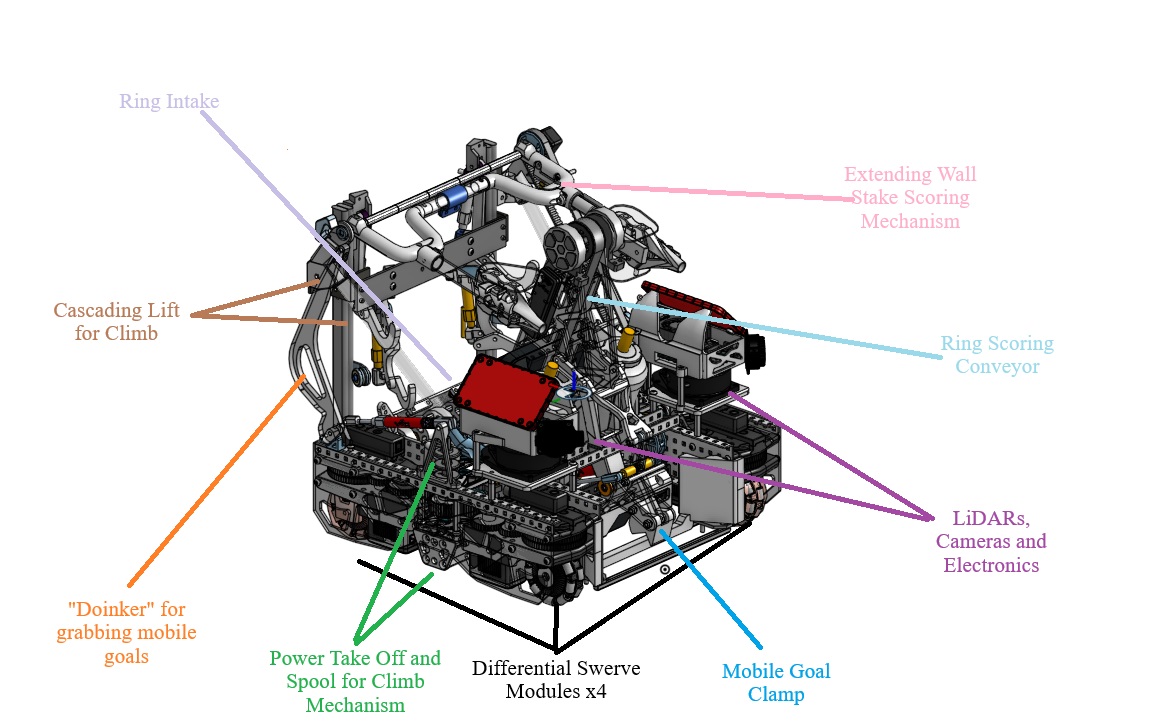
Here is a diagram of the 24" robot in CAD. We use OnShape for its VCS and collaboration features.

As you can see, there are a lot of features. It was important to manage the complexity by staying organized and on the same page as everyone on the team.
We did a significant amount of testing to make our robots reliable; here are some examples
HTD5M Belt Scoring Testing
Cascade Lift Testing
Swerve Debugging
Full Scoring Test
How we made it:
We are limited by the VEX U Rules to certain sensors, actuators and materials. We are required to use VEX motors (which are small DC motors with an encoder), most VEX Sensors (although we can use some of our own, like LiDARs) and are restricted to some materials. Our construction is a mix of 3D-printed PLA+ components and CNC-machined polycarbonate and 6061 aluminum.
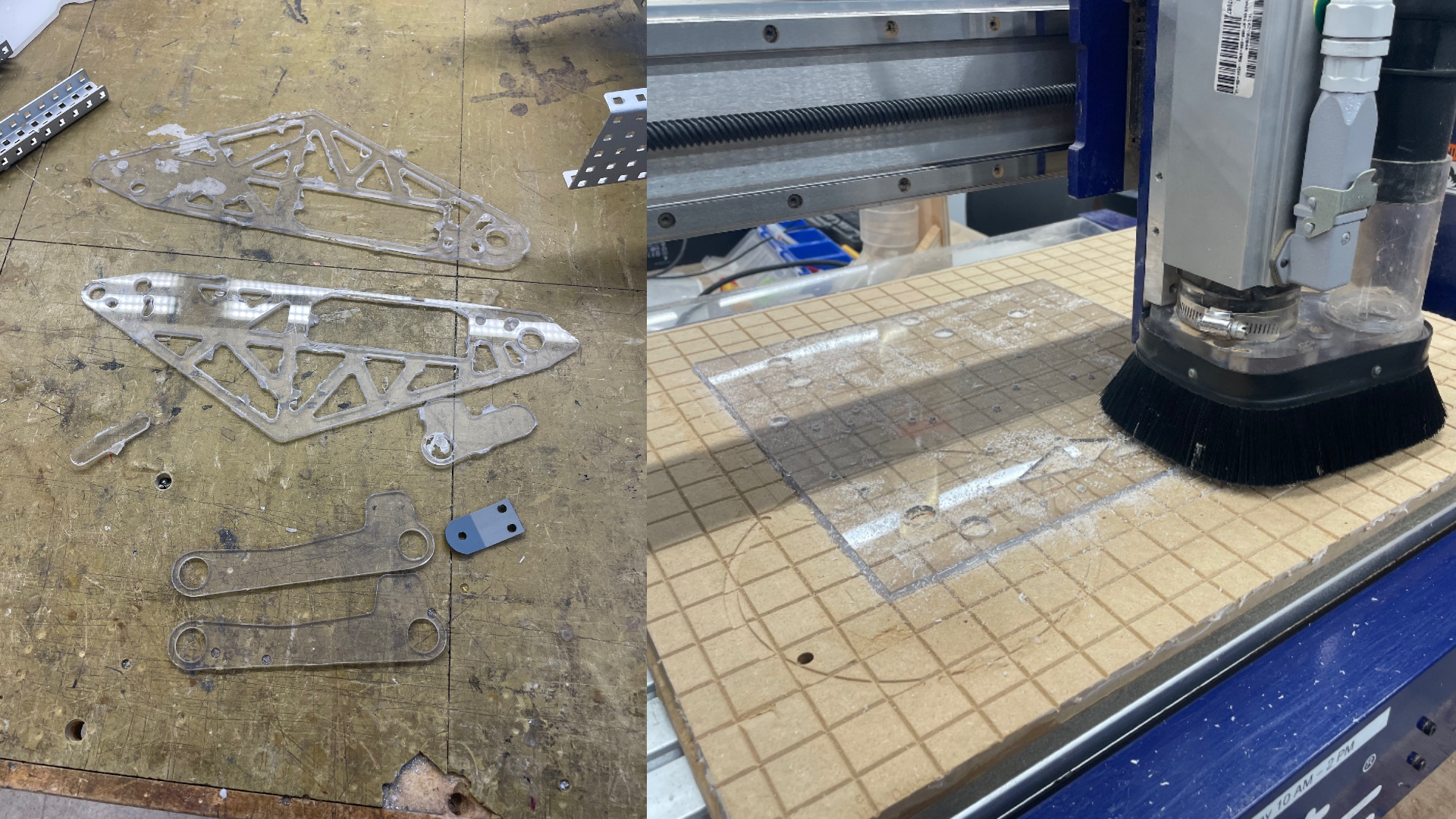
This year the team got a CNC machine for the first time. This allowed us to expand our design capabilities and rapidly produce high strength parts.
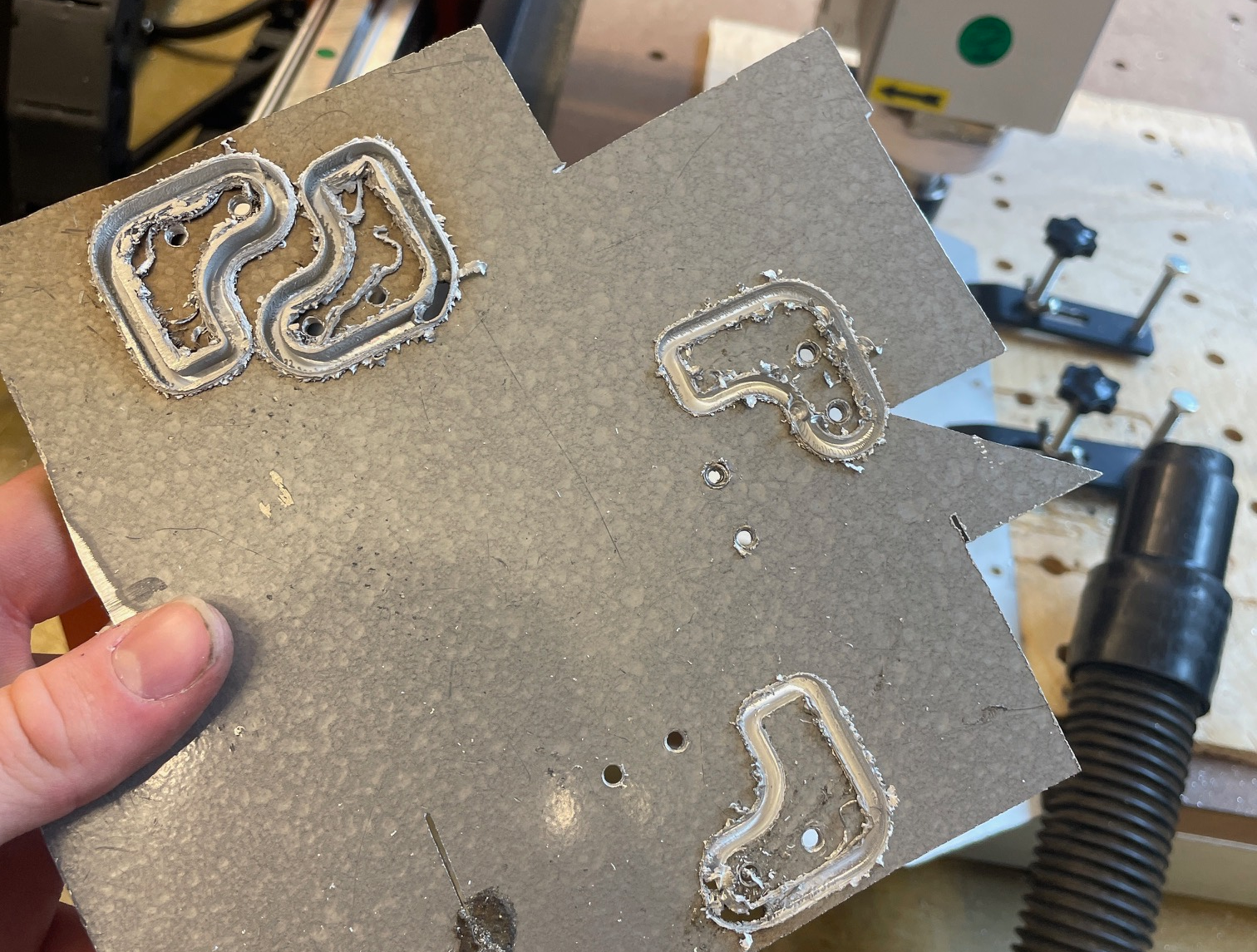
 Some polycarbonate frame pieces we CNC machined. If braced properly along the thin axis, polycarbonate can be exceptionally strong and impact resistant. We use it in scenarios where 6061 isn’t necessary but more strength is required than a standard PLA print
Some polycarbonate frame pieces we CNC machined. If braced properly along the thin axis, polycarbonate can be exceptionally strong and impact resistant. We use it in scenarios where 6061 isn’t necessary but more strength is required than a standard PLA print
A lot of our parts are 3D-printed. We used this manufacturing method for scenarios where we needed super unique geometry that had to be somewhat strong. A good example of a good application of 3D printing was these double jointed intake ramps that we tried. The bottom joint of the ramp had to fit together with the top half of the ramp; this meant we needed a cutout in the bottom joint that would be hard to do with a CNC machine.
The white ramps are made out of PLA and need to both have unique geometry and be strong enough to take impact from the side of the ladder
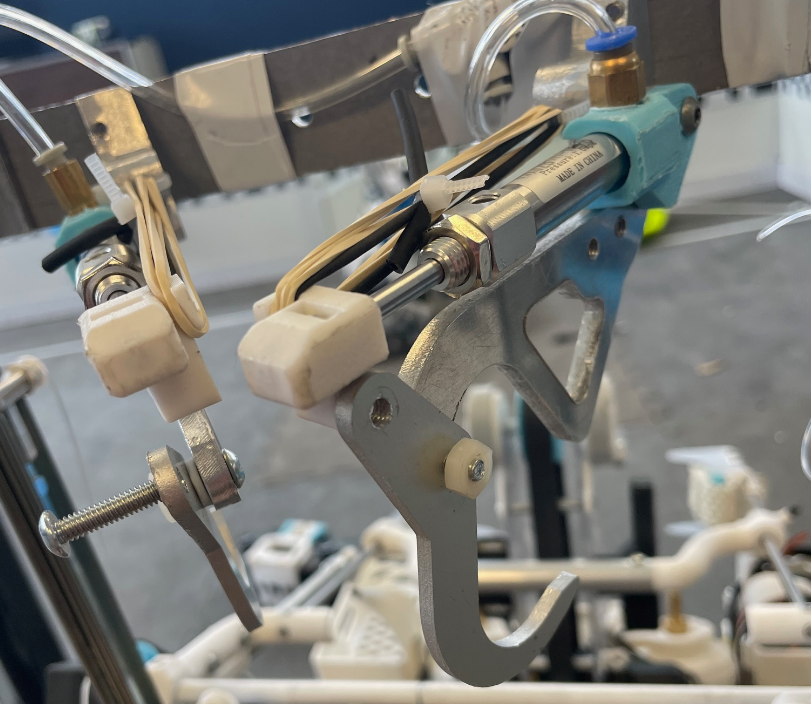
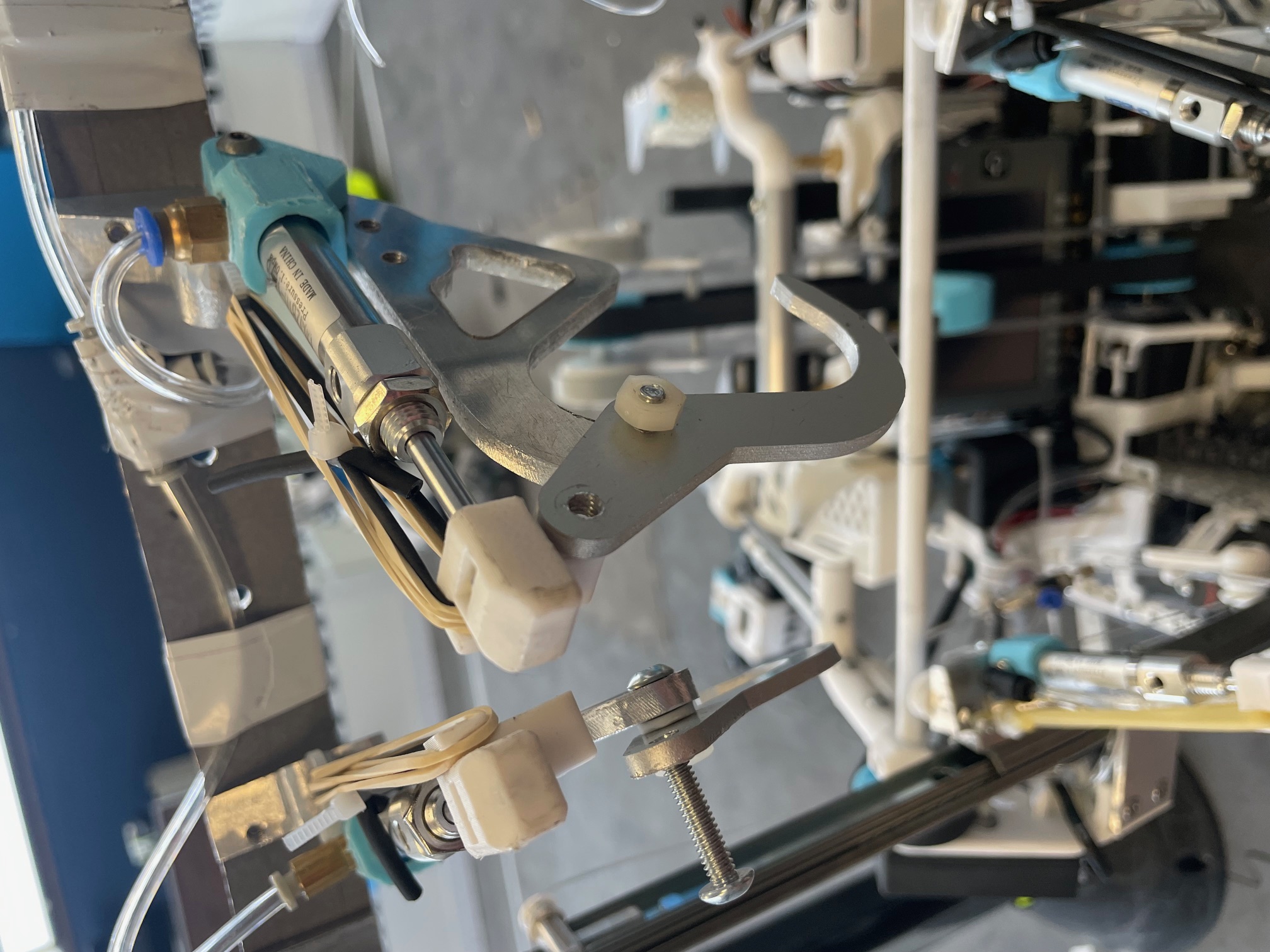
Here are some aluminum hooks we made for our climb. We initially tried with polycarbonate but had too much deflection, so we went with 6061 and got good results.

I learned a lot about CNCing – making GCode from 3D Models, setting zero positions and proper offsets, the importance of managing waste with a vacuum, and so on. I also learned how not to set feeds and speeds…

What we learned:
My main three takeaways from this season are that ideas are more important than execution in prototyping/design, proper hardware and material selection is key and that you need good CAD habits to do well.
Ideas are king when trying to solve a problem. It really sucks when you spend 3 weeks on the wrong design just to realize that there was a simpler and more effective way. We tried to spend more time brainstorming this year to get the right idea. And if not enough info was known to make a decision, some really quick prototypes can be all you need to make the right choice.
Knowing when to use what material is a super big skill in mechanical design. I would always just 3D print stuff when I started doing mechanical design, but I learned a lot from others about how we can use other materials to make things stronger and lighter, or for cheaper. Also, I learned that friction is an opp and that bearings and idlers must be used to exterminate it.
I made hundreds of parts this year and I would rarely properly dimension them. I figured it was quicker to just re-do a sketch than to fully define it. When you produce so many parts, however, and you mess it all up really bad, it becomes impossible to re-do everything from scratch. I have learned the importance of properly defining my sketches and will never go back to the dark side(I hope).
What we accomplished:
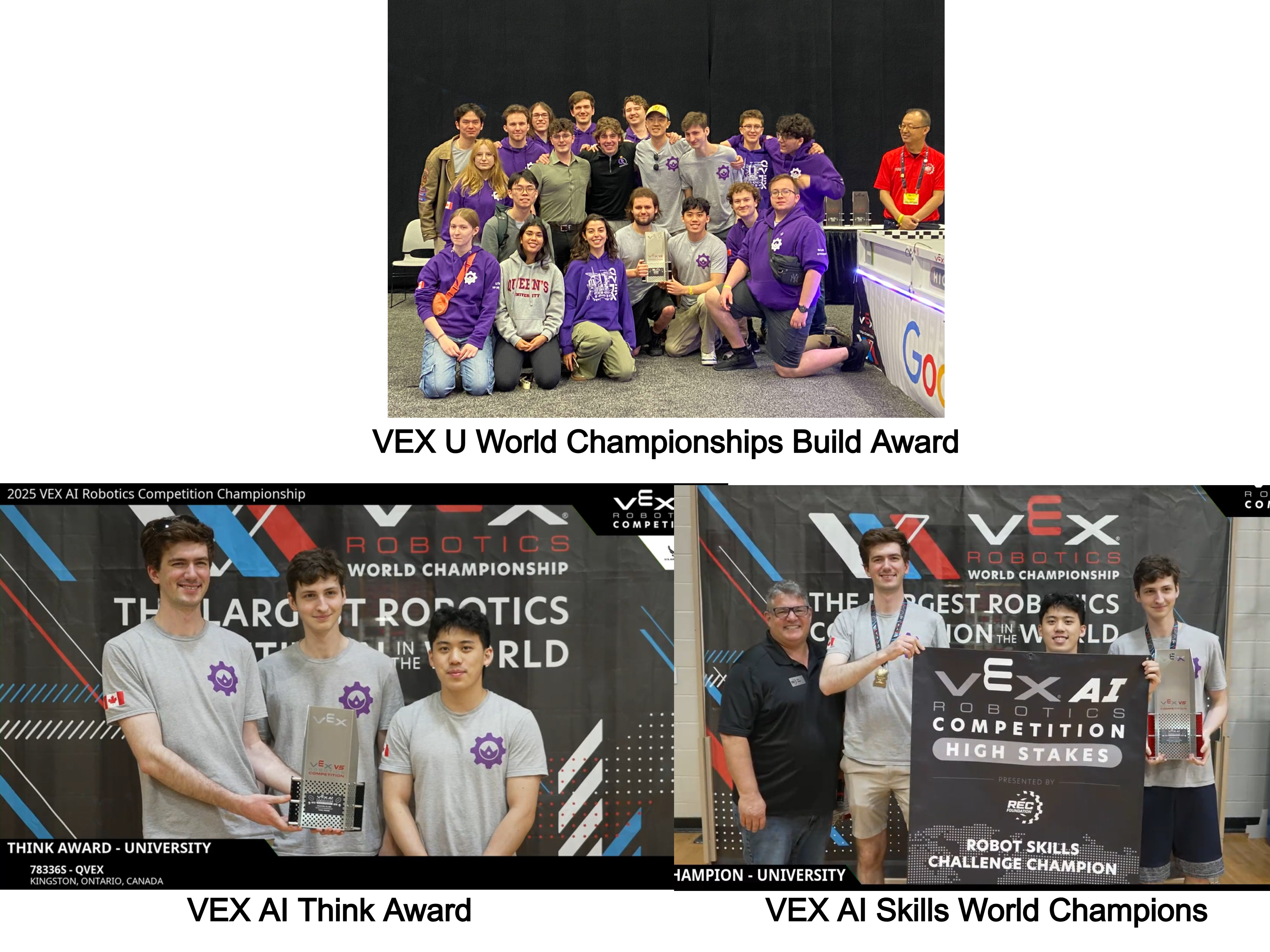
This year we won 12 awards in total, including being named the Canadian Skills Champions and the VEX AI World Skills Champions.

I am proud of our team for all of their hard work in designing and testing our robots – out of 100 teams, we were recognized with the World Championship Build Award for having robots that were “exceptionally well-constructed with high durability, attention to detail, and reliability”.
 Our qualification robots and their results
Our qualification robots and their results
 Sunrise in Kingston after late-night building
Sunrise in Kingston after late-night building


Related albums

VEX Robotics Qualification 2025: Striving for Consistency
7 photos

Ingenuity Labs: Characterizing VR Headset Performance with Cobots
6 photos
Preparing Snow Cones Using a Robot Arm
6 photos